Improve motor controls' sensitivity to electrical disturbances
Electric motors are the workhorses of industry. Electricity, the motor's feedstock, allows some to operate 24 hours a day, seven days a week, 365 days per year. Unfortunately, the controls that start, stop and monitor motors are sensitive to minor disturbances in the electric supply. Two in particular are momentary voltage decreases or "sags" and momentary power interruptions lasting as little as a few milliseconds.
While motors themselves are robust enough to be left in operation during many of these events, sensitive motor controls aren't, and often "drop" the motor off-line. Interrupting the manufacturing process necessitates a restart, which reduces output, requires additional manpower and, in some cases, damages costly products.
Devices are available for holding conventional motor controls "in" during momentary electrical disturbances. While often employed to provide motor "ride-through" during voltage sags, the devices are seldom used for ride-through of momentary power interruptions because of concerns about damaging driven machines and OEM warranty restrictions.
The problem
Theoretically, restarting an induction motor after a momentary voltage interruption while it's still rotating could inflict serious damage on the motor and connected production machinery. Magnetic flux from the collapsing induction field, system capacitance and residual magnetism in the motor counters the field created by the reapplied voltage, producing an instantaneous torque that may exceed levels anticipated in the design of the motor and driven machine. As a result, some equipment manufacturers won't honor warranties on equipment driven by motors equipped with ride-through devices during power interruptions. However, little testing has been done to measure the actual peak torque or to develop simulations that can predict the peak torque for common motor applications and verify the theory.
Progress Energy, using the services of the Motor Resource Center test lab at Advanced Energy, has embarked on a research project to measure the peak torque produced when a motor rides through a momentary power interruption. Duke Power and Dominion Resources also have joined the project. Testing includes 10-, 50- and 75-hp motors operated under controlled conditions representing industrial pump, fan and air compressor applications.
The ride-through project
Laboratory testing, completed in early 2003, determined that motors may ride through many momentary interruptions without risking damage to the motor or driven machine. Procedures, results and applications are further discussed below.
Mechanical configuration
A three-phase TEFC squirrel-cage induction motor functions as the test motor with a power absorption unit as the load. A torque transducer connects the motor and power absorption unit to monitor shaft torque. Torsionally-stiff couplings ensure that coupling play won't dampen high-frequency torque transients. A 1,024-point-per-revolution encoder attached to the torque transducer acquires shaft speed. A flywheel attached to the shaft of the power absorption unit allows testing at several values of load moment of inertia.
Electrical configuration
Three-phase Variacs control motor voltage to less than one percent unbalance. The Variacs are connected to the primary side of an isolation transformer; the secondary side is connected to a fused disconnect, which is followed by a NEMA 5 motor starter and a custom-built solid-state point-on-wave controller (PoWC). The NEMA 5 starter only serves to energize the PoWC and remains closed during the tests. The PoWC controls the induction motor.
Hall-effect current transformers, located between the PoWC and the motor, capture current waveforms, while sense leads installed at the motor terminals capture voltage waveforms. A Nicolet transient analyzer with a one-MHz sampling rate records voltage, current, torque and speed data.
Experimental results
Tests for each inertia and load combination, as outlined in Table 1, proceed as follows: Once the motor reaches a steady-state operation, the PoWC removes the motor supply voltage. After a predetermined interruption time, the motor supply voltage is reapplied and the motor returns to steady-state conditions. Data were collected in interruption increments of 0.10 cycle for the 100 percent load tests, and in 0.25 cycle increments for the 75 percent, 50 percent and 25 percent load tests.
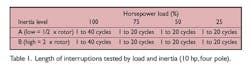
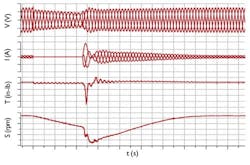
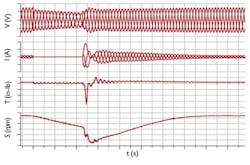
Figure 1: Interrupting power under high-inertia loading produced a negative torque transient 20 times the motor's rated torque.
The motor is operating at steady-state condition when, at time t = 0, the motor supply voltage is removed and reapplied 5.5 cycles later. Upon reconnection, the motor's back-emf is approximately 194 out-of-phase with the line voltage. To realign the rotor currents, the motor suddenly decelerates, which produces a negative torque transient that reaches -7,300 in-lb, a value 20 times greater than the motor's rated torque.
It should be noted that this laboratory test configuration represents a worst-case scenario. Usually, induction motors supply power back into a fault, other loads or both if it rides through a voltage interruption. Therefore, the back-emf decays more rapidly and reduces the magnitude of the torque transient associated with supply voltage reapplication [1]. Other researchers ([2] and [3]) have reported similar results, but at a lower magnitude for the same test. While these tests report a torque transient 20 times rated load, [2] reports a worst-case torque peak of 5.5 times load, and [3] reports the worst-case torque peak at 9.5 times rated load. This discrepancy may result from differences in load inertias.
Torque and interruption time
Figure 2 shows the magnitude of torque and current transients as a function of interruption time measured in cycles. The negative torque maximums correspond to interruption times when the reapplied supply voltage is out of phase with the motor's back-emf. The negative torque minimums correspond to interruption times when the reapplied supply voltage is in phase with the back-emf. In other words, if the back-emf and the supply voltage are in phase at the moment voltage is reapplied, the motor doesn't produce a negative torque transient. This scenario is first observed at six cycles for low load inertia and at 8.5 cycles for high load inertia.
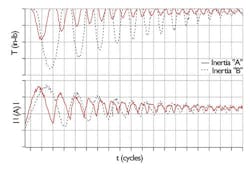
Figure 2: Higher load inertia has a significant effect on the torque transient but little effect on the current transient.
Figure 2 shows significant effects of load inertia on the magnitude of the torque transient, but no effect is observed on the current transient. The larger load inertia clearly produces more severe negative torque peaks. Load inertia also affects the interruption interval that produces the worst-case transients. While the worst-case torque transient for the low-inertia tests occurs at 3.9 cycles, the worst-case torque transient for high load inertia occurs at 5.5 cycles. This increase in interruption time is likely attributable to the larger load inertia delaying shaft speed decay, thus delaying the time required for the motor's back-emf and supply voltage to drift out of phase.
Figure 3 depicts the worst-case torque and current transients recorded for the 10-hp test cases, plotted by unit. The motor's operating load has no apparent effect on the magnitude of the torque and current transients. However, operating load does affect the interruption interval that produces the worst-case transients. Decreasing loads increase the worst-case interruption interval. Additionally, the worst-case current transient and the worst-case torque transient don't occur at the same interruption interval.
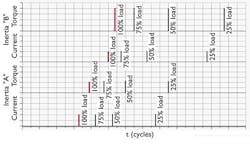
Figure 3: The worst-case torque and current transients don't occur at the same interruption interval.
Project status
A computer model based on test data is being developed to predict the peak torque during typical momentary power interruptions. Knowing the peak torque expected provides equipment and motor manufacturers, as well as end users, with the knowledge they need to apply commercially-available "ride-through" devices while avoiding damage to motors or driven equipment.
Bibliography[1] F.J. Maginniss, N.R. Schultz, "Transient Performance of Induction Motors," AIEE Transactions, Vol. 63, 1944, pp. 641-646.[2] I.R. Smith, S. Sriharan, "Induction Motor Reswitching Transients," Proc. IEE, Vol. 114, No. 4, April 1967, pp. 503-509.[3] F. P. Flynn, R.D. Slater, W.S. Wood, "Transient Negative Torques in Induction Motors due to Rapid Reconnection of the Supply," Proc. IEE, Vol. 116, No. 12, December 1969, pp. 2009-2014.[4] A. Kelley, J. Cavaroc, J. Ledford, L. Vassalli, "Voltage Regulator for Contactor Ridethrough," IEEE Transactions on Industry Applications, Vol 36, No. 2, March/April 2000. pp. 697-704. |
The equipment developed for lab testing to simulate and monitor momentary interruptions is port-able, allowing it to be taken into manufacturing facilities to verify "ride-through" devices perform properly during interruption. Results from facility testing help refine "ride-through" device logic, improve production efficiency and reduce manufacturing costs.
John Cavaroc is principal investigator at North Carolina State University. Scott Peele is project manager at Progress Energy. Jeremy Morrison is project manager at the Motor Resource Center. Ziba Kellum, is senior motors engineer at Advanced Energy in Raleigh, N.C. Kellum can be contacted at www.advancedenergy.org and (800) 869-8001.