Bearings and electricity don't match
The damage that shaft currents can do to bearings in electric motors and connected equipment has been studied for close to a century (Table 1). But the underlying causes of shaft currents weren’t understood well until recently, so solutions that worked in one case often failed in another. While there’s still much to learn, the information and materials now available make it possible to develop effective solutions.
Although the phenomenon has been called shaft voltages, circulating currents, bearing currents and circulating voltages, the term shaft currents is the most common. That's because current, not voltage, does the damage that leads to premature bearing failure.
A basic principle of electricity is that voltage will be induced in a conductor that passes through a magnetic field. The same thing happens as the shaft, rotor and various internal parts pass through the magnetic field that travels through an electric motor. This interaction induces a voltage/current in the frame-shaft-bearing path that is the root cause of shaft currents.
It’s not the voltage that damages a bearing, but rather the current. Fuses fail because the current, not the voltage, is too high. But, we don’t have a practical way to measure the current through the shaft, so we measure the magnitude of the voltage instead.
Magnetic dissymmetry causes circulating currents
Early on, shaft currents in electric motors were caused by magnetic dissymmetry (gaps in the iron, such as segmented laminations used to build stator cores larger than about 35 in. (900 mm in diameter), uneven air gap, circulating currents in the parallel circuits of a three-phase winding, or variations between bolt-in DC poles. Because the electromagnetic field in the stator rotates around the stator bore, those dissymmetries are a source of induced voltage in the frame. Through-bolts in rotors are another source, but more about them later.
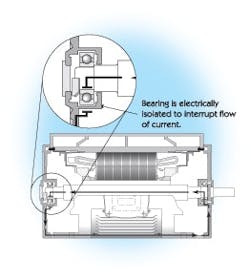
The current that magnetic dissymmetry induces “circulates” from the frame through one bearing, along the shaft, through the other bearing and back to the frame. The practical solution to this problem is to break the circuit by insulating the opposite drive end (ODE) bearing. Just as turning off a light switch stops the current flow through a light bulb, insulating the ODE bearing interrupts the circuit through the bearings (Figure 1).
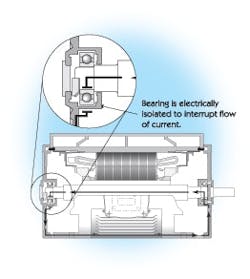
Figure 1. An insulated bearing prevents circulating currents from destroying the bearings.
Another solution is to install a shaft grounding brush in parallel with the ODE bearing (Figure 2). Although this doesn’t stop the current, it diverts some of it from the bearing to a parallel path (Figure 3). The lower the resistance of the brush-shaft interface compared to the resistance through the bearing, the more current will be diverted from the ODE bearing. Although a grounding brush is effective for reducing bearing failures on the ODE, it does nothing to reduce the current through the drive end (DE) bearing. Because the DE bearing is usually larger than the ODE bearing, though, it can better withstand shaft currents.
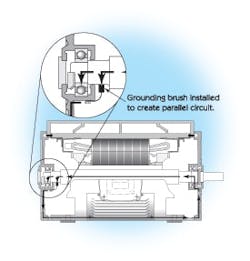
Figure 2. Mounting a grounding brush reroutes only some of the circulating current.
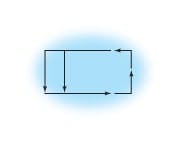
Figure 3. Graphicical representation of parallel path of grounding brush.
Note that brush resistance is a critical part of this solution. Not just any carbon brush will do. The special grounding brushes for this purpose have extremely low resistance. The key to success is to provide a path that’s much lower resistance than the path through the bearing to divert as much current as possible. If the resistance through the brush/shaft path is equal the bearing/shaft path, half of the current will pass through the bearing. Bearing life would be extended, but the problem would still exist.
Another problem with the grounding brush solution is that resistance across the brush/shaft interface increases as the shaft becomes dirty or corrodes. That diverts more current back through the bearing.
Although it’s current that damages bearings, manufacturers don’t publish current-carrying capacities for bearings. Even if they did, there’s no practical way to measure the current passing through the shaft. That means we must rely on measuring shaft voltages to determine if harmful shaft currents are present.
The guideline many manufacturers use is 100 mV maximum for ball bearings and 200 mV for sleeve bearings. (NEMA MG-1 part 31.4.4.3 suggests a limit of 300 mV measured end-to-end on the shaft. But it’s impractical to make the measurement with the motor in service.) With shaft currents caused by magnetic dissymmetry, it was rare to measure shaft voltages greater than a few volts.
Variable-frequency drives up the ante
Enter the pulse-width-modulated variable-frequency drive (PWM VFD). When VFDs started to become popular, shaft currents became a major issue. For quite a while, service centers tried to solve the problem by insulating the ODE bearing or adding a grounding brush. Unfortunately, each of these so-called tried and true solutions yielded mixed results. Users disagreed on which was best, and many reported less than satisfactory results with either method. A belt-and-suspenders approach seemed to work best, but it wasn't clear why.
Longer cable runs worsened the problem, as did poor grounding connections, earning certain drives reputations as motor killers. Higher switching frequencies (20 kHz) also caused more bearing problems than slower 5 kHz drive settings, but there was no clear line above which to expect trouble.
VFDs rectify AC to DC, and then chop the DC into positive and negative pulses. Varying the width of the DC pulse simulates a variable AC sine wave and changes the frequency, thereby changing the motor speed.
One problem with this is that common-mode voltage, which is always zero on a true AC sine wave, becomes essentially line voltage on a VFD (Figure 4). Because the DC voltage is either positive or negative, the three phases are either + + - or + - - at any given moment. As a result, shaft currents became a significant problem for motors powered by VFDs, even those much smaller than had previously experienced trouble.
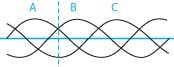
Figure 4. In a three-phase line, the algebraic sum of the three voltages (common mode voltage) at any instant is always zero.
In contrast to the relatively low voltages associated with circulating currents, technical papers report VFD-related shaft voltages as high as 25 volts. EASA’s Technical Support Department also has received reports of shaft voltages of 40 volts or more on rebuilt armatures or rotors with the combination of through-bolts and skewed slots.
Static discharge and capacitive coupling
Back when flat leather belts drove most machinery, electrostatic discharges also damaged bearings.
[pullquote]Although these belts are no longer common, static friction still poses problems for belts, paper roll winders, and similar applications. These static discharges may have prompted the earliest use of shaft grounding brushes.
Capacitive coupling between the rotating field in the stator and the spinning induction rotor also can cause shaft currents. Insulating one bearing won’t cure this problem because this isn’t a circulating current. Insulating both bearings causes the insulation to act as a capacitance. The induced voltage continues to build, possibly to dangerous levels, until the “capacitor” discharges across the insulation. In certain applications, such as hazardous locations, capacitive discharge could become a source of ignition.
What we know now
It’s generally accepted that we can measure the shaft voltage, although it’s the current that’s harmful.
Shaft voltage can be measured between the ends of the motor shaft, or from the end bracket to the shaft. To minimize false readings that could result from friction, it’s best to attach a brass or copper brush to the end of the test lead that will contact the shaft.
Under controlled conditions in a service center, one old-timer's technique is to touch a length of welding cable to both ends of the shaft while observing the contact region for arcing and checking for current with a clamp-on ammeter. The problem with this method is that some of the current still passes through the bearings, so the welding cable — at best — is a parallel path. Although this simple test doesn’t show how much current the bearing still carries, it’s still qualitatively useful. If the diverted current is enough to strike an arc when the lead wire touches the shaft, there’s sufficient current to damage a bearing.
How much current will damage a bearing, and how much of the current is still passing through the bearing compared to the welding cable, are matters for conjecture. About the only way to measure the actual shaft current is to place a current transformer (CT) or ammeter around the shaft between the bearings.
That is rarely practical.
Discussions with engineers from several manufacturers in recent years have provided useful insights into the causes of VFD-related shaft currents, as well as practical solutions to the problem. For example, it’s now clear that the higher the switching frequency in a PWM drive, the greater the chance of damaging the bearings with shaft currents.
We also know that a dedicated common ground from the motor to the drive is critical. Even if the motor and the drive case are each grounded in accordance with electrical codes, it’s possible to measure as much as 30 volts potential between the two ground connections. The "skin effect,” or tendency for AC currents to travel on the conductor’s outer surface, makes stranded ground cable best for this application. These cables have more surface area than a solid conductor and, therefore, higher resistance to current flow.
New solutions
The ceramic-coated and hybrid bearings now available offer simple ways to insulate bearings. There are three options:
- Coated outer race (ceramic or aluminum oxide or similar material).
- Coated inner race (ceramic or aluminum oxide or similar material).
- Hybrid bearing (steel races and ceramic rolling elements).
There are two considerations here. First, thicker insulation has a better ability to withstand voltages. Second, placing insulation between two conductive materials is the definition of a capacitor. The larger the insulation surface, the higher the capacitance. So, the best solution is thick insulation, with as small a surface area as possible.
The first two options offer the same insulation thickness but, for a typical ball bearing, the surface area of the inner race bore is roughly half that of the exterior of the outer race. The coated inner race therefore has less capacitance, which is good. The third option, however, is superior. The insulation thickness is the diameter of the rolling element (the ceramic ball), and the surface area is limited to the small contact area between the balls and the races. That means the ceramic ball offers insulation thickness that is orders of magnitude greater than that of the coated race options, and at a fraction of the capacitance.
Although the word ceramic might conjure up images of delicate coffee mugs, hybrid bearings actually are made from silicon nitride, an extremely durable material. Striking the ball with a hammer or bouncing it off a concrete floor won’t even scratch it. It’s tough stuff. So, don’t worry about the hybrid bearing being unable to take your most rugged high-vibration applications.
It’s clear that there are two mechanisms for shaft voltages: circulating current, which can be interrupted by insulating a bearing; and capacitive coupling, which requires insulation of both bearings plus the use of a grounding brush. It’s also important to provide a common ground between the motor and the drive case.
Bearings are apt to be damaged even by very low current passing through them. And with the proliferation of VFDs, grounding problems on one motor can cause shaft currents in other nearby equipment.
Until a better solution is developed, motors operating from VFDs will benefit from the practice of insulating both bearing housings — or using hybrid/ceramic bearings — and installing shaft grounding brushes.
Chuck Yung is a technical support specialist at the Electrical Apparatus Service Association (EASA), St. Louis Contact him at [email protected] and (314) 993-2220.